Explanation of new Version 3 meta file system
The new Version 3.0 and higher meta files are now available on the Argo GDACs to accommodate the increasingly complex missions that Argo floats are now performing, sometimes with multiple sensors.
With more than half of floats deployed in 2013 employing two-way communication systems, it is becoming more likely that a float may change its mission during its lifetime. To record the mission the float performs for each cycle, the CONFIG_MISSION_NUMBER variable is used in the META, PROF, and TRAJ files.
The new variables in the meta file, LAUNCH_CONFIG_PARAMETER_NAME and LAUNCH_CONFIG_PARAMETER_VALUE record pre-deployment or launch settings, leaving the CONFIG_MISSION_NUMBER to describe the rest of the missions the float performs during its lifetime.
Single configuration
Many Argo floats do not change their configuration for the entire life of the float. Each cycle is repeated with the same configuration as the previous one.
When there is only one configuration, CONFIG_MISSION_NUMBER in the META, PROF, and TRAJ files is set to 1: all the cycles are programmed to be the same. Note that in this case, floats will still have a set of pre-deployment/launch configuration information that contains all the start settings for the float. So for a float with one basic mission, it will have launch configuration parameters and mission 1 configuration parameters.
Multiple configurations
However, some floats may be configured to change their behavior from cycle to cycle leading to multiple configurations, or they may be reprogrammed after deployment, also leading to multiple configurations. When this occurs, the configuration from the first cycle has CONFIG_MISSION_NUMBER set to 1. Each subsequent configuration change will be recorded as additional entries in the CONFIG_MISSION_NUMBER, with the value increased sequentially by the integer one. All variables from mission 1 must be repeated in subsequent missions.
Argo best practice is a minimum of configuration missions. If there is a change to one or more of the configuration parameters that does not repeat a previous configuration, then a new mission number must be used. If the configuration parameters change, but mirror a previous mission then that mission number should be re-used. See the diagram below.
Users are able to determine which mission applies to each cycle by looking at the CONFIG_MISSION_NUMBER variable in the PROF and TRAJ files.
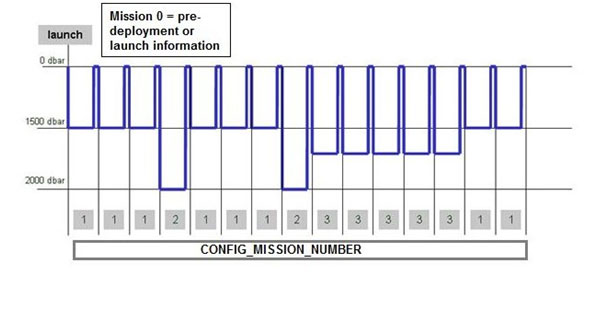
In the example, there are 3 different float behaviors to record, (with park depth varying between 1500, 2000 and 1700 dbar). Each of these new behaviors requires a new mission number. This is in addition to the pre-deployment or launch information:
- CONFIG_PARAMETER_NAME: “CONFIG_ParkPressure_dBAR”
- CONFIG_PARAMETER_VALUE: “1500”
- CONFIG_MISSION_NUMBER: 1
- CONFIG_PARAMETER_NAME: “CONFIG_ParkPressure_dBAR”
- CONFIG_PARAMETER_VALUE: “200”
- CONFIG_MISSION_NUMBER: 2
- CONFIG_PARAMETER_NAME: “CONFIG_ParkPressure_dBAR”
- CONFIG_PARAMETER_VALUE: “1700”
- CONFIG_MISSION_NUMBER: 3
Float sensor and parameter information
There are also floats carrying additional sensors measuring temperature, salinity, and biogeochemical parameters. The meta file now contains information informing the user which sensor is measuring which parameter. The N_SENSOR dimension informs the user how many sensors are mounted on the float and the PARAMETER_SENSOR variable indicates which sensor is measuring which parameter. For example, CTD_PRES, OXYGEN_OPTOPE. There are additions variables describing the units, accuracy and resolution for each parameter.