Explanation of new trajectory 3.1 file system
Trajectory 3.1 files are now available on the Argo GDACs. These re-designed trajectory files still contain two groups of variables divided into arrays of different dimensions: the N_MEASUREMENT and the N_CYCLE array. The major changes are highlighted below. To read the new format in detail, please refer to the latest version of the User’s Manual on the documentation section of the ADMT website.
N_MEASUREMENT variable group
The N_MEASUREMENT variable group contains all the raw data from the float including the locations, cycle timing information, and measurements from the float. There are a few new variables and modifications to the current JULD variable.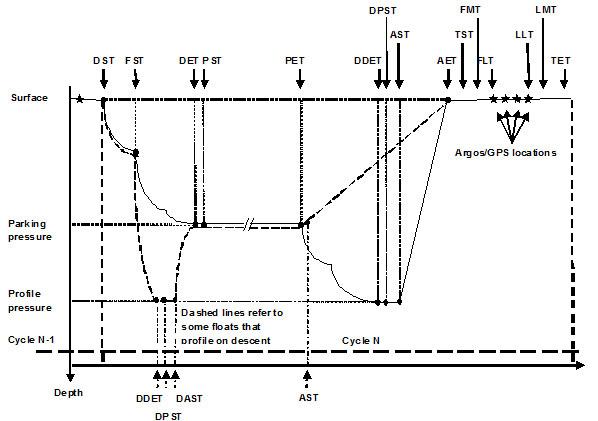
- MEASUREMENT_CODE indicates where in the cycle the location, times and measurements occur. To understand this important new variable, please refer to the Measurement Code Table (Reference Table 15) which contains all the flags and their meanings. Given the variety of floats and how they work, the ‘MEASUREMENT_CODE’ variable may contain different values from one float type to the next. Not all measurement codes are mandatory, so if a float does not experience a particular measurement code, it will not be in the N_MEASUREMENT array. If a float does experience a mandatory measurement code, but no time can currently be assigned to it, then the variables are set to fill value and STATUS flags indicate this time may be filled later.
- ‘JULD’ contains the raw timing values either from the satellite system or from the float. The values in ‘JULD’ cannot be estimated or altered such as for clock drift.
- ‘JULD_ADJUSTED’ contains the best estimate of float timing available for this float. If necessary, it contains adjusted timing variables due to clock drift. The times can be adjusted either in real time or in delayed mode due to clock drift or estimation of times based on float behaviour by a float expert. The ‘JULD_ADJUSTED_STATUS’ variable indicates how the ‘JULD_ADJUSTED’ value was filled and indicates whether the time is estimated or measured. This may lead to times where ‘JULD_ADJUSTED’ is filled, but ‘JULD’ contains ‘FillValue’ because the time is estimated rather than measured.
N_CYCLE variable group
The N_CYCLE variable group contains duplicated cycle timing information from the N_MEASUREMENT variable group, plus a few variables that pertain to the entire cycle. There are new cycle timing variables which aim to completely describe the float’s trajectory for velocity calculations and which are described in the User’s Manual. Some of the other new variables will be described below:
- The ‘CLOCK_OFFSET’ variable has been added to address clock drift which can occur over time in some Argo float versions that provide times for dated events or dated measurements. To correct for drift, a clock offset must be applied where clock offset is defined as a float time minus UTC time.
- ‘REPRESENTATIVE_PARK_PRESSURE’ is the best pressure value assigned to the drift phase. The STATUS variable indicates how this pressure was determined.
- ‘CYCLE_NUMBER_INDEX’ clearly links the N_CYCLE and N_MEASUREMENT variable groups. This variable indicates the cycle number for the information contained in that index of the N_CYCLE array. It also is the profile cycle number associated with the trajectory cycle in that index of the N_CYCLE array.
- ‘CYCLE_NUMBER_INDEX_ADJUSTED’ contains a cycle numbering which has been assessed and adjusted to be correct, especially for the purposes of trajectory calculations. If a cycle is recovered during delayed mode and no profile file is created, the cycle must be added into the ‘CYCLE_NUMBER_ADJUSTED(N_MEASUREMENT)’ and ‘CYCLE_NUMBER_ADJUSTED_INDEX(N_CYCLE)’ variables.
Real time and Delayed mode trajectory files
With trajectory file format 3.1, Argo is moving to a two-file system for trajectory files. There will be a Real Time (R) and a Delayed Mode (D) trajectory file.
R files will contain only real time data and will be created by DACs. Real time data means raw data plus any cycle timing estimates that can be done in real time. Estimated data will be in the ‘JULD_ADJUSTED’ variable. If this is not possible, there will be only raw data in ‘JULD’ variable in the R files.
D files will contain all data, ie both real time and delayed mode data, and will be created by the PI/scientist responsible for the float. The delayed mode data will go in the ADJUSTED variables in the N_MEASUREMENT array and any cycle timing variables in the N_CYCLE array that cannot be filled in real time.
D files will exist either when a float dies and all cycles have been d-moded or when some cycles have been d-moded. If the float is still alive, no cycles will be added to the D file by the DAC in real time. Cycles will be added only when they have been d-moded by the PI or scientist responsible for the float.
This means that a float could have only an R file or both an R and a D file depending on the stage of delayed mode data.
For example, a float has completed 100 cycles; the first 25 are d-moded, but the next 75 are not. WMO_Rtraj.nc contains real time data for all 100 cycles. WMO_Dtraj.nc contains real time and delayed mode data for the first 25 cycles.